International Rover Challenge 2026
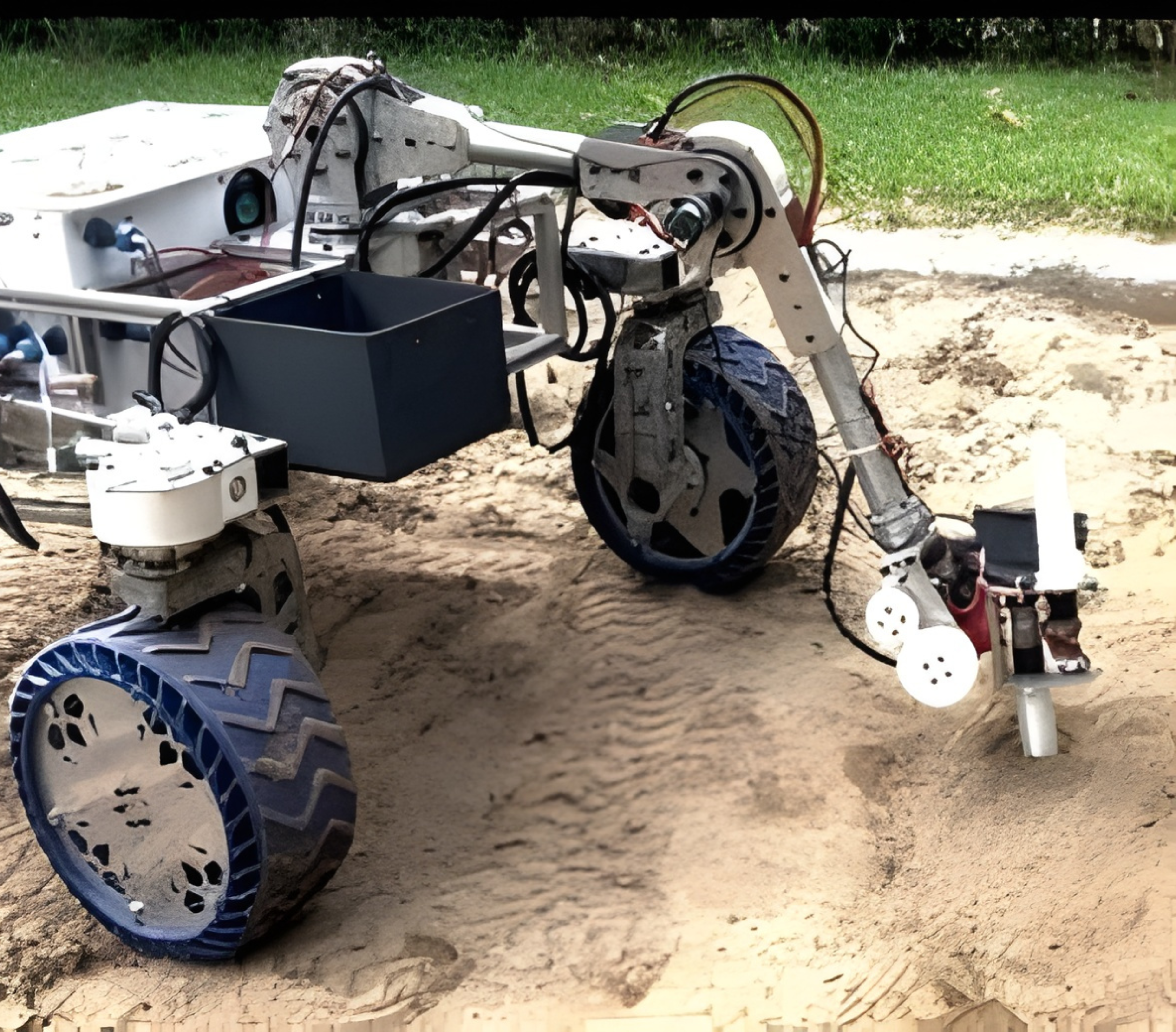
The International Rover Challenge 2026 is a prestigious global competition that brings together teams from universities across the world to design and build advanced Martian rovers capable of executing a range of mission-inspired tasks that assess engineering innovation, system reliability, and field performance. The development of these rovers demands cutting-edge mechanical design supported by the cohesive integration of electronic and AI-enabled subsystems, all operating together as a unified robotic system to ensure durability, and functionality in extreme environments. The teams must prepare a rover capable of navigating uneven terrain, detecting designated cones, performing manipulation tasks with the robotic arm of the rover, and collecting data for further scientific research. Beyond the technical capabilities of the rover, the challenge enables the participants to gain comprehensive understanding of end-to-end project execution and contribute to the future of space exploration, planetary rover development, and autonomous systems.
Competition Tasks
Missions
ABEX
The rover will serve as a mobile science lab to investigate Mars analog environments for signs of extinct or extant life. The rover must be equipped with at least one instrument or assay capable of detecting life, chosen by the team. It will collect and analyze subsurface samples of at least 10g from depths of 10 cm or more from multiple sites. The rover must also document sites using wide-angle panoramas (1:3 height-to-width ratio) with GPS coordinates, elevation, cardinal directions, and scale, alongside close-up, high-resolution images. The rover will drop a sample at a designated location for future retrieval during the Reconnaissance and Autonomous Delivery Mission.
RADO
The Reconnaissance and Autonomous Delivery Operation (RADO) mission requires the rover to operate across varied terrain where in the first stage, the rover performs reconnaissance for 10 minutes, searching for objects, capturing their photos and GPS coordinates, and optionally storing one of them. The second stage is a 20 minute autonomous delivery task where the rover must pick up and deliver objects such as tools, containers, or rocks to specified GPS points and colour markers. Teams are evaluated on their ability to correctly locate, store, and deliver objects and the accuracy of placement within the allotted time.

IDMO
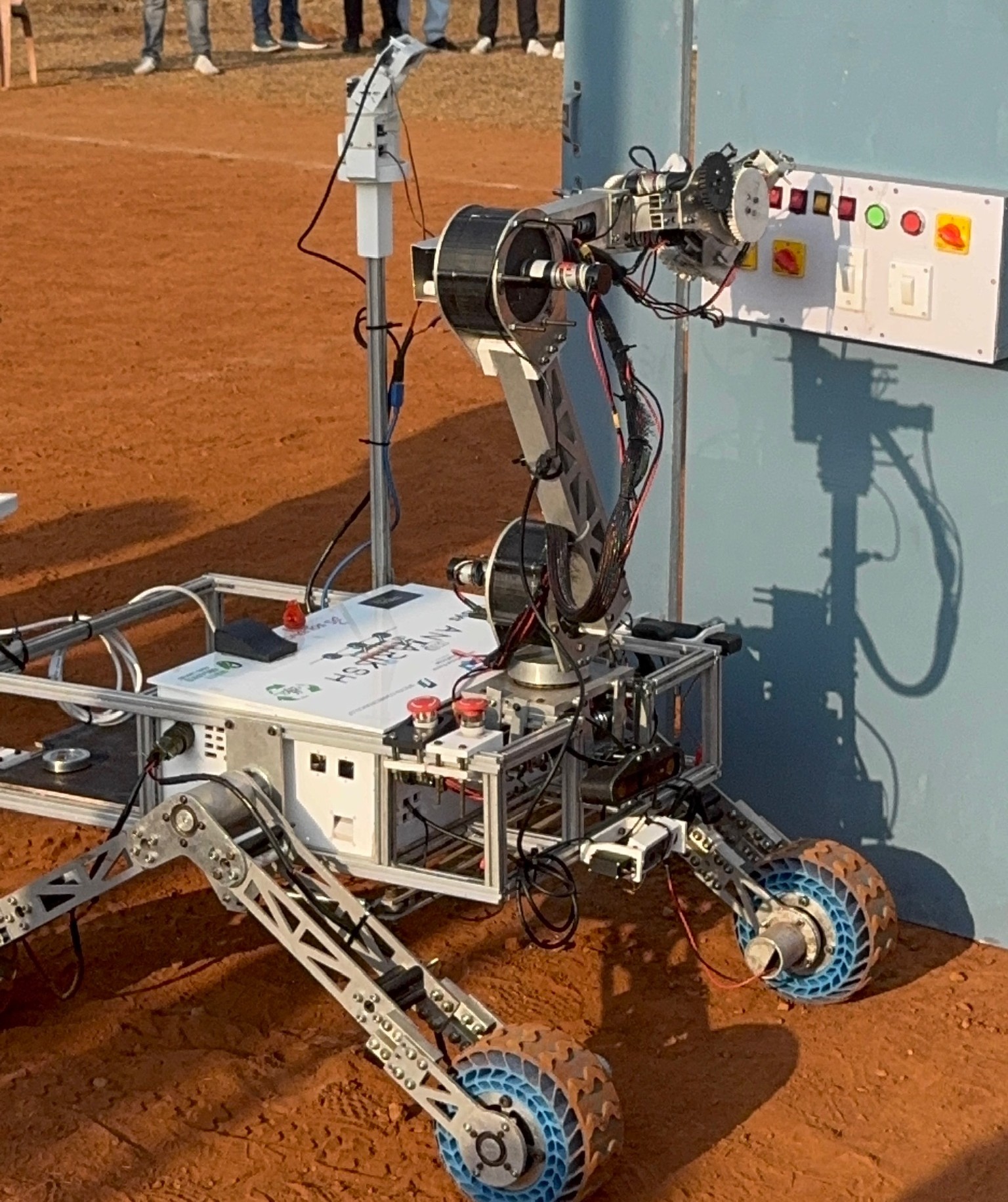
The Instrument Deployment and Maintenance Operation (IDMO) mission involves precise tasks using the rover's robotic arm. It includes two stages: Instrument Maintenance, where the rover picks and places a cache, operates panels, interacts with switches, knobs, joysticks, and plugs, and performs other fine operations; and Instrument Deployment, where the rover retrieves and places sample caches in designated locations near collection panel and reads codes, patterns or text displayed near the panel for verification by judges.
BPP & PIMA
The Business and Partnership Plan (BPP) mission examines the ability of a team to develop business skills, build partnerships, and secure sponsorships. It emphasises effective planning, communication, and teamwork with industry and academia to help ensure the project’s long-term success. The Project Implementation and Management Assessment (PIMA) evaluates the project and the final rover design through direct interaction between teams and judges. Teams present their development process, addressing important engineering and management elements, from strategic planning to manufacturing, testing, and spin-offs from the project.

Exhibition
The Rover Exhibition facilitates interaction between teams, judges, and the local academia fostering interest and inspiring students. Teams showcase the capabilities of their rovers through standee flex banners, helping cultivate professional connections that support future collaboration. The exhibition also aims to motivate young individuals to explore the fields of science and robotics by highlighting their significance and relevance in today's world.

Team Journey
Our Experience

Competing at the International Rover Challenge (IRC) has been a truly memorable experience. It pushed our technical capabilities and managerial skills beyond our limits. From brainstorming to manufacturing the rover for complex challenges like autonomous navigation and scientific exploration, the competition thoroughly tests our engineering expertise. Coordinated efforts among various departments enabled the team to develop a rover fully equipped “To Decipher Unimaginable”. Furthermore, competing alongside international teams helps us understand different methodologies and approaches, giving us practical insights that strengthens our overall learning and offers a broader perspective on innovation, turning the event into a platform for cross-cultural learning and professional growth. Securing a podium finish for the past two years has left us incredibly inspired and proud, giving us confidence as a team. However, we view this success not as a final destination, but as a strong foundation to build upon. Using this experience as a solid framework, we strive to improve our skills and achieve even greater heights this year.